Semantic Robot Vision Challenge
University of Maryland Team
The Terrapins
| Home | Approach | Hardware | Software | Media |
Semantic Robot Vision Challenge University of Maryland Team The Terrapins |
|||||||||
|
|||||||||
Media |
Slides |
||
Videos |
||
|
|
||
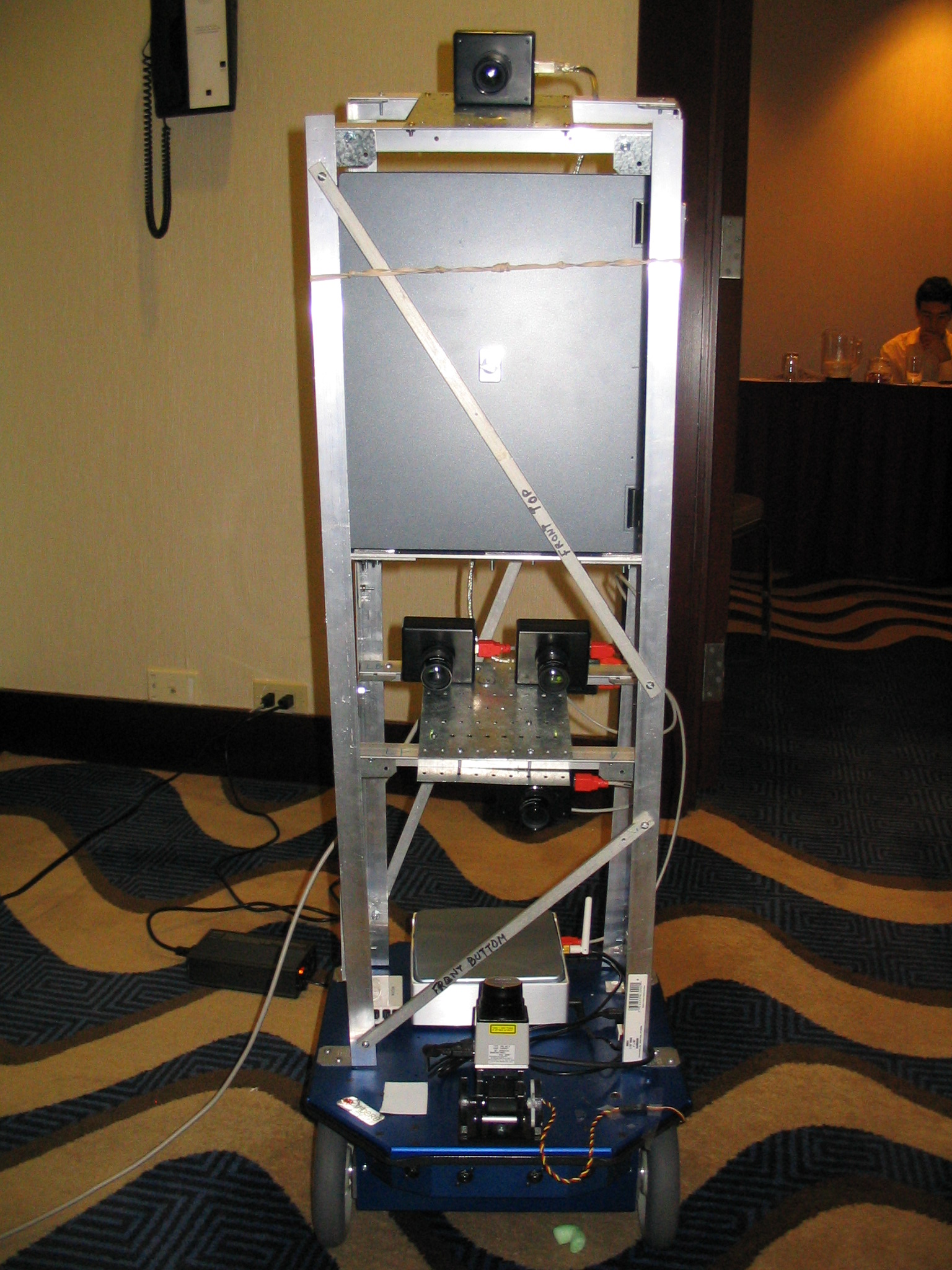
Photos |
||||||
|
||||||
Related
Web Links |
||
| Home • Approach • Hardware • Software • Media | |||
| Last updated on : November 2007 | |||